ROS核心概念及其在生物科技研发中的应用
ROS(Robot Operating System)是一个灵活且强大的机器人软件开发框架,广泛应用于机器人系统构建。其核心概念包括节点、节点管理器、话题、消息、服务、参数和功能包等,这些概念为机器人系统提供了模块化和分布式的开发方式。在生物科技研发领域,ROS的模块化架构和通信机制能够有效支持实验室自动化、生物传感数据处理和智能实验设备控制等应用。
节点(Node)是ROS中的基本执行单元,每个节点负责完成一个特定的功能,例如传感器数据采集、运动控制或算法计算。在生物科技研发中,节点可以代表不同的实验设备模块,如温度控制器、液体处理系统或显微镜成像单元。
节点管理器(ROS Master)负责协调所有节点之间的通信,提供服务注册、查找和消息路由。它确保了分布式系统中的节点能够高效协作。在生物实验室中,节点管理器可以统一管理多个实验设备节点,确保数据流和控制命令的同步。
话题(Topic)是节点间异步通信的机制,节点通过发布和订阅话题来交换数据。例如,在生物反应器监控系统中,一个节点可以发布温度数据话题,而另一个节点订阅该话题以进行实时分析和记录。
消息(Message)是话题中传输的数据结构,定义了数据的类型和格式。在生物科技应用中,消息可以包含实验参数、传感器读数或图像数据,例如基因序列信息或细胞培养环境数据。
服务(Service)提供同步的请求-响应通信模式,适用于需要即时反馈的操作。在生物研发中,服务可用于控制设备执行特定任务,如启动离心机或查询实验状态。
参数(Parameter)用于存储配置数据,可以在运行时动态调整。例如,在生物实验自动化中,参数可以定义培养温度、pH值阈值或实验持续时间,方便研究人员灵活修改。
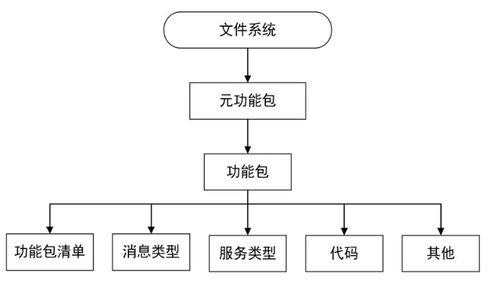
功能包(Package)是ROS软件的基本组织单元,包含节点、消息、服务和其他资源。在生物科技领域,功能包可以封装特定实验流程的代码,如DNA测序分析或药物筛选算法,促进代码复用和团队协作。
ROS的核心概念为生物科技研发提供了高效的软件框架,通过模块化设计和强大的通信机制,支持复杂实验系统的集成与自动化,加速了生物技术创新和产业化进程。
如若转载,请注明出处:http://www.mingkanglai.com/product/36.html
更新时间:2025-11-28 08:24:40